Citations
Evaluation of metrics for the performance of wireless networks of mobile robots in the framework of Industry 4.0
Evaluación de métricas para el rendimiento de redes inalámbricas de robots móviles en el marco de la Industria 4.0
Open | Download
Section
Articles
How to Cite
Evaluation of metrics for the performance of wireless networks of mobile robots in the framework of Industry 4.0. (2022). Revista EIA, 19(38), 3834 pp. 1-10. https://doi.org/10.24050/reia.v19i38.1598
Dimensions




license

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Copyright statement
The authors exclusively assign to the Universidad EIA, with the power to assign to third parties, all the exploitation rights that derive from the works that are accepted for publication in the Revista EIA, as well as in any product derived from it and, in in particular, those of reproduction, distribution, public communication (including interactive making available) and transformation (including adaptation, modification and, where appropriate, translation), for all types of exploitation (by way of example and not limitation : in paper, electronic, online, computer or audiovisual format, as well as in any other format, even for promotional or advertising purposes and / or for the production of derivative products), for a worldwide territorial scope and for the entire duration of the rights provided for in the current published text of the Intellectual Property Law. This assignment will be made by the authors without the right to any type of remuneration or compensation.
Consequently, the author may not publish or disseminate the works that are selected for publication in the Revista EIA, neither totally nor partially, nor authorize their publication to third parties, without the prior express authorization, requested and granted in writing, from the Univeridad EIA.
Show authors biography


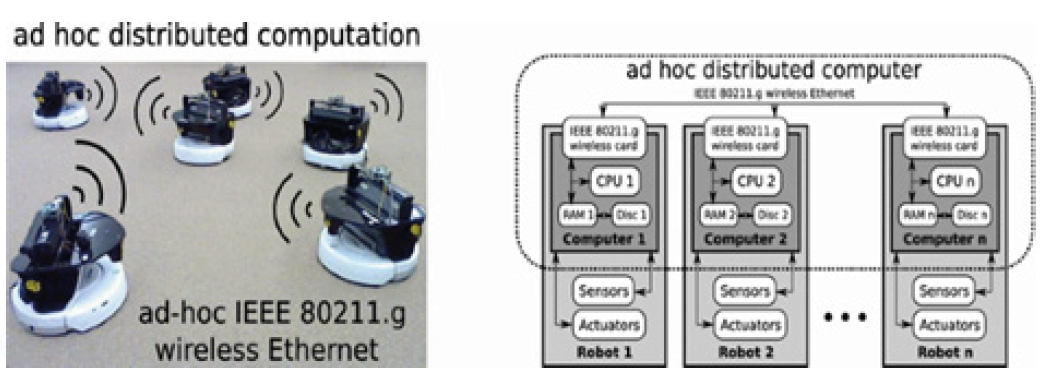
Current mobile robotics applications within the framework of Industry 4.0 require the use of a network of robots to ensure communication between different robotic agents. According to some authors, there are challenges at the robot network level given that there are delays in data transmission due to the large flow of information and the noise that can occur. Therefore, there are different performance metrics that allow evaluating the performance of robots and the robot network, but when evaluating a robot network it is not clear which of the different metrics to use. This article proposes an evaluation of performance metrics based on a selection of characteristics, in order to support decision-making that allows selecting the most appropriate metrics according to the application. It is expected that with this solution, researchers will be able to select the metrics they require for the evaluation of robot networks in the framework of Industry 4.0.
Article visits 432 | PDF visits 408
Downloads
Download data is not yet available.
- E. Spaho, L. Barolli, V. Kolici and A. Lala, “Performance Evaluation of Different Routing Protocols in a Vehicular Delay Tolerant Network,” 2015 10th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Krakow, 2015, pp. 157-162. DOI: 10.1109/BWCCA.2015.46.
- Erboz, G. (2017). How To Define Industry 4.0: Main Pillars Of Industry 4.0. 7th International Conference on Management (pág. 9). Nitra: ICoM. DOI: 10.1016/j.promfg.2018.02.034.
- Falco, Joseph & Van Wyk, Karl & Messina, Elena. (2018). Performance Metrics and Test Methods for Robotic Hands. National Institute of Standards and Technology, 45-65. DOI: 10.6028/NIST.SP.1227-draft
- Gagliardi, E., & Peñalver, G. (2006). Evaluación de Métricas en Redes de Computadoras. IX Congreso Argentino de Ciencias de la Computación, 1361-1372. DOI: 10.1007/978-3-540-77024-4_4.
- Guarnizo, J., & Mellado, M. (2016). Arquitectura de equipos de fútbol de robots con control centralizado. Revista Iberoamericana de Automática e Informática industrial, 54-67. DOI: 10.1016/j.riai.2016.05.005
- Hollinger, G., Choudhuri, C., Mitra, U., & Sukhatme, G. (2013). Distortion Metrics for Robotic Sensor Networks. International Workshop on Wireless Networking for Unmanned Autonomous Vehicles, 380-395. DOI: 10.1109/GLOCOMW.2013.6825195.
- Jawhar, I., Mohamed, N., Wu, J., & Al-Jaroodi, J. (2018). Networking of Multi-Robot Systems: Architectures and Requirements. Journal of sensor and actuator networks (pág. 17). Pittsburgh: MDPI. DOI: 7. 52. 10.3390/jsan7040052.
- Rossi, F., & Pavone, M. (2013). Decentralized decision-making on robotic networks with hybrid performance metrics. 51st Annual Allerton Conference on Communication, Control, and Computing, 358-365. DOI: 10.1109/Allerton.2013.6736546.
- Wang, L., & Lui, M. (2014). Hierarchical Auction-based Mechanism for Real-Time Resource Retrieval in Cloud Mobile Robotic System. IEEE International Conference on Robotics & Automation (ICRA), (págs. 2164-2169). Hong Kong. DOI: 10.1109/ICRA.2014.6907157
- Ye, W., Vaughan, R., Sukhatme, G.,Heidemann, J., Estrin, D., & Mataric, M. (2003). Evaluating control strategies for wireless-networked robots using an integrated robot and network simulation. Proceedings 2001 ICRA. IEEE International Conference on Robotics and Automation (págs. 1050-4729). Seoul, South Korea: IEEE. DOI: 10.1109/ROBOT.2001.933068.
- Zimmerman, T. (2019). Metrics and key performance indicators for robotic cybersecurity performance analisys (Vol. 1). (U. D. Commerce, Ed.) new york: National Institute of Standards and technology. DOI: 10.6028/NIST.IR.8177
- Zavlanos, M., Ribeiro, A., & Pappas, G. (2010). Mobility & Routing Control in Networks of Robots. 49th IEEE Conference on Decision and Control, (págs. 7545-7550). Hilton Atlanta Hotel, Atlanta, GA, USA. DOI: 10.1109/CDC.2010.5717013.
- Zhang, F., Chen, W., & Xi, Y. (2006). Motion Synchronization in Mobile Robot Networks: Robustness. IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China: IEEE. DOI: 10.1109/IROS.2006.282274