Citations
Navegación autónoma reactiva de un robot móvil basada en aprendizaje profundo y comportamientos difusos
Enhancing mobile robot navigation: integrating reactive autonomy through deep learning and fuzzy behavior
Open | Download
Section
Articles
How to Cite
Navegación autónoma reactiva de un robot móvil basada en aprendizaje profundo y comportamientos difusos. (2024). Revista EIA, 21(42), 4229 pp. 1-14. https://doi.org/10.24050/reia.v21i42.1764
Dimensions




license

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Copyright statement
The authors exclusively assign to the Universidad EIA, with the power to assign to third parties, all the exploitation rights that derive from the works that are accepted for publication in the Revista EIA, as well as in any product derived from it and, in in particular, those of reproduction, distribution, public communication (including interactive making available) and transformation (including adaptation, modification and, where appropriate, translation), for all types of exploitation (by way of example and not limitation : in paper, electronic, online, computer or audiovisual format, as well as in any other format, even for promotional or advertising purposes and / or for the production of derivative products), for a worldwide territorial scope and for the entire duration of the rights provided for in the current published text of the Intellectual Property Law. This assignment will be made by the authors without the right to any type of remuneration or compensation.
Consequently, the author may not publish or disseminate the works that are selected for publication in the Revista EIA, neither totally nor partially, nor authorize their publication to third parties, without the prior express authorization, requested and granted in writing, from the Univeridad EIA.
Show authors biography


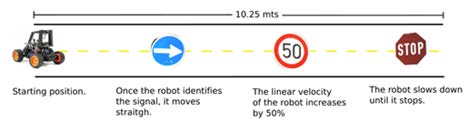
Objetivo: este estudio tuvo como objetivo desarrollar una arquitectura de control para la navegación autónoma reactiva de un robot móvil mediante la integración de técnicas de Deep Learning y comportamientos difusos basados en el reconocimiento de señales de tráfico. Materiales: la investigación utilizó transfer learning con la red Inception V3 como base para entrenar una red neuronal en la identificación de señales de tráfico. Los experimentos se llevaron a cabo utilizando un Donkey-Car, un robot móvil de código abierto tipo Ackermann, con limitaciones computacionales inherentes. Resultados: la implementación de la técnica de transfer learning arrojó un resultado satisfactorio, logrando una alta precisión del 96.2% en la identificación de señales de tráfico. No obstante, se encontraron desafíos debido a retrasos en los cuadros por segundo (FPS) durante las pruebas, atribuidos a la capacidad computacional limitada de la Raspberry Pi. Conclusiones: al combinar Deep Learning y comportamientos difusos, el estudio demostró la efectividad de la arquitectura de control en mejorar las capacidades de navegación autónoma del robot. La integración de modelos pre-entrenados y lógica difusa proporcionó adaptabilidad y capacidad de respuesta a escenarios de tráfico dinámicos. Investigaciones futuras podrían centrarse en optimizar los parámetros del sistema y explorar aplicaciones en entornos más complejos para avanzar aún más en las tecnologías de robótica autónoma e inteligencia artificial.
Article visits 115 | PDF visits 98
Downloads
Download data is not yet available.
- Afif, M., Ayachi, R., Said, Y., Pissaloux, E., & Atri, M. (2020). Indoor image recognition and classification via deep convolutional neural network. In Proceedings of the 8th International Conference on Sciences of Electronics, Technologies of Information and Telecommunications (SETIT’18), vol. 1, pp. 364-371. Cham, Switzerland: Springer International Publishing.
- Bachute, M., & Subhedar, J. (2021). Autonomous driving architectures: Insights of machine learning and deep learning algorithms. Machine Learning with Applications, vol. 6, 100164. Available at: https://doi.org/10.1016/j.mlwa.2021.100164.
- Bengio, Y. (2016). Machines who learn. Scientific American Magazine, vol. 314(6), pp. 46–51. Available at: https://doi.org/10.1038/scientificamerican0616-46.
- Bjelonic, M. (2024). Yolo v2 for ROS: Real-time object detection for ROS. Available online: https://github.com/leggedrobotics/darknet_ros/tree/feature/ros_separation (accessed on 17 May 2024).
- Blacklock, P. (1986). Standards for programming practices: An alvey project investigates quality certification. Data Processing, vol. 28(10), pp. 522–528. Available at: https://doi.org/10.1016/0011-684X(86)90069-9.
- Dahirou, Z., & Zheng, M. (2021). Motion detection and object detection: Yolo (You Only Look Once). In 2021 7th Annual International Conference on Network and Information Systems for Computers (ICNISC), pp. 250-257. New York, USA: IEEE.
- DonkeyCar. (2024). How to build a Donkey. Available online: http://docs.donkeycar.com/guide/build_hardware/ (accessed on 17 May 2024).
- Itsuka, T., Song, M., & Kawamura, A. (2022). Development of ROS2-TMS: New software platform for informationally structured environment. Robomech J., vol. 9(1). Available at: https://doi.org/10.1186/s40648-021-00216-2.
- Kahraman, C., Deveci, M., Boltürk, E., & Türk, S. (2020). Fuzzy controlled humanoid robots: A literature review. Robotics and Autonomous Systems, vol. 134, p. 103643. Available at: https://doi.org/10.1016/j.robot.2020.103643.
- Lighthill, J. (1973). Artificial intelligence: A general survey. The Lighthill Report. Available at: http://dx.doi.org/10.1016/0004-3702(74)90016-2.
- Lin, H., Han, Y., Cai, W., & Jin, B. (2022). Traffic signal optimization based on fuzzy control and differential evolution algorithm. IEEE Transactions on Intelligent Transportation Systems, vol. 1(4). Available at: https://doi.org/10.59890/ijetr.v1i4.1138.
- McCarthy, J., Minsky, M. L., Rochester, N., & Shannon, C. E. (1955). A proposal for the Dartmouth summer research project on artificial intelligence. AI Magazine, vol. 27(4), p. 12. Available at: https://doi.org/10.1609/aimag.v27i4.1904.
- Mengoli, D., Tazzari, R., & Marconi, L. (2020). Autonomous robotic platform for precision orchard management:
- Architecture and software perspective. In 2020 IEEE International Workshop on Metrology for Agriculture and Forestry, MetroAgriFor, pp. 303-308. New York, USA: IEEE.
- Newell, A., Simon, H. A., & Shaw, J. C. (1958). Report on a general problem-solving program. Pittsburgh, Pennsylvania: Carnegie Institute of Technology, pp. 1-27. Available at: http://dx.doi.org/10.1016/0004-3702(74)90016-2.
- OTL. (2024). ROS inception v3. GitHub, Inc. Available online: https://github.com/OTL/rostensorflow (accessed on 17 May 2024).
- Qian, J., Zhang, L., Huang, Q., Liu, X., Xing, X., & Li, X. (2024). A self-driving solution for resource-constrained autonomous vehicles in parked areas. High-Confidence Computing, vol. 4(1), 100182. Available at: https://doi.org/10.1016/j.hcc.2023.100182.
- Redmon, J., Santosh, D., Girshick, R., & Farhadi, A. (2016). You only look once: Unified, real-time object detection. In 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, pp. 779-788. Available at: https://doi.org/10.1109/CVPR.2016.91.
- ROS. (2024). Ros rqt_graph. Open Robotics. Available online: http://wiki.ros.org/rqt_graph (accessed on 17 May 2024).
- Sharifani, K., & Amini, M. (2023). Machine learning and deep learning: A review of methods and applications. World Information Technology and Engineering Journal, vol. 10(07), pp. 3897-3904. Available at: https://doi.org/10.4028/www.scientific.net/JERA.24.124.
- Soori, M., Arezoo, B., & Dastres, R. (2023). Artificial intelligence, machine learning and deep learning in advanced robotics, a review. Cognitive Robotics, vol. 3, pp. 54-70. Available at: https://doi.org/10.1016/j.cogr.2023.04.001.
- Stallkamp, J., Schlipsing, M., Salmen, J., & Igel, C. (2012). Man vs. computer: Benchmarking machine learning algorithms for traffic sign recognition. Neural Networks, vol. 32, pp. 323-332. Available at: https://doi.org/10.1016/j.neunet.2012.02.016.
- Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., & Wojna, Z. (2016). Rethinking the inception architecture for computer vision. In 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, pp. 2818–2826. Available at: https://doi.ieeecomputersociety.org/10.1109/CVPR.2016.308.
- Transfer learning. (2024). Transfer learning. Available online: https://paperswithcode.com/task/transfer-learning (accessed on 17 May 2024).
- Treleaven, P., & Lima, I. (1982). Japan’s fifth generation computer systems. Computer, vol. 15(08), pp. 79–88. Available at: https://doi.org/10.1109/MC.1982.1654113.
- Vinolia, A., Kanya, N., & Rajavarman, V. N. (2023). Machine learning and deep learning based intrusion detection in cloud environment: A review. In 2023 5th International Conference on Smart Systems and Inventive Technology (ICSSIT), IEEE, pp. 952-960. Available at: 10.1109/ICSSIT55814.2023.10060868.