Citations
Algorithms for image processing implemented in the InMoov Humanoid Robot.
Algoritmos para el procesamiento de imágenes implementados en el Robot Humanoide InMoov.
Open | Download
Issue
Section
Articles
How to Cite
Algorithms for image processing implemented in the InMoov Humanoid Robot. (2021). Revista EIA, 18(36), 36019 pp. 1-16. https://doi.org/10.24050/reia.v18i36.1495
Dimensions




license

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Copyright statement
The authors exclusively assign to the Universidad EIA, with the power to assign to third parties, all the exploitation rights that derive from the works that are accepted for publication in the Revista EIA, as well as in any product derived from it and, in in particular, those of reproduction, distribution, public communication (including interactive making available) and transformation (including adaptation, modification and, where appropriate, translation), for all types of exploitation (by way of example and not limitation : in paper, electronic, online, computer or audiovisual format, as well as in any other format, even for promotional or advertising purposes and / or for the production of derivative products), for a worldwide territorial scope and for the entire duration of the rights provided for in the current published text of the Intellectual Property Law. This assignment will be made by the authors without the right to any type of remuneration or compensation.
Consequently, the author may not publish or disseminate the works that are selected for publication in the Revista EIA, neither totally nor partially, nor authorize their publication to third parties, without the prior express authorization, requested and granted in writing, from the Univeridad EIA.
Show authors biography


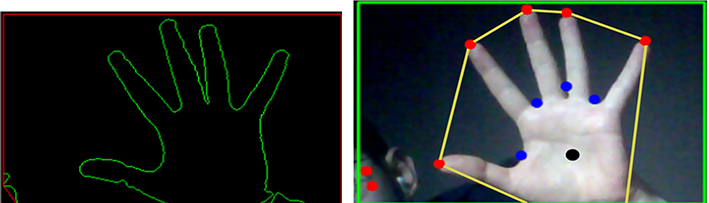
The robotics world seemed to be a science fiction world until a few years ago, however, in recent times robots have been incorporated into our lives, as educational assistants, medical assistants, receptionists and in various scenarios more, where the goal is to develop useful and safe robots. This article presents the implementation of image processing algorithms for the detection and motion tracking, facial recognition and robotic limb control by mimesis of the hands, an embedded voice synthesizer system with question and answer was implemented, to this is performed the characterization and control of the actuators. These algorithms are developed to strengthen human-robot interaction (HRI), implemented in the humanoid robot InMoov, the first open-source 3D robot in the world. Obtaining an average system efficiency of 90% in environments with controlled lighting.
Article visits 628 | PDF visits 486
Downloads
Download data is not yet available.
- Bertozzi, M., Broggi, A., Del Rose, M., Felisa, M., Rakotomamonjy, A., & Suard, F., (2007). IEEE Intelligent Transportation Systems Conference, 30 Sept - 3 Oct 2007, Seattle: USA, A Pedestrian Detector Using Histograms of Oriented Gradients and a Support Vector Machine Classifier, IEEE Xplore, 22 Oct 2007. Disponible en: https://doi.org/10.1109/ITSC.2007.4357692
- Buitrago, O., Ramírez, A. & Britto, R. (2015). Nuevo Algoritmo para la Construcción de la Envolvente Convexa en el Plano. Información tecnológica, 26 (4), pp 1-9. https://doi.org/10.4067/S0718-07642015000400017.
- Deepthi, R. S., & Sankaraiah, S., (2011). IEEE Conference on Open Systems (ICOS2011), 25-28 Sept 2011, Langkawi: Malaysia, Implementation of Mobile Platform Using Qt and Open CV For Image Processing Applications, IEEE Xplore, 15 Nov 2011. Disponible en: https://doi.org/10.1109/ICOS.2011.6079235
- Diftler, M., Culbert, C. J., Ambrose, R. O., Plat, R., & Bluethmann, W. J., (2003). IEEE International Conference on Robotics and Automation, 14-19 Sept 2003, Taipei:Taiwan, Evolution of the NASA/DARPA Robonaut control system, IEEE Xplore, 10 Nov 2003. Disponible en: https://doi.org/10.1109/robot.2003.1241975
- Eidenmueller, H. (2017). The Rise of Robots and the Law of Humans. Oxford Legal Studies Research Paper No. 27/2017, pp 2-8. https://doi.org/10.2139/ssrn.2941001
- Gonzalez-Paz, A., Beltran-Casanova, D., & Fuentes-Gari, E. R. (2016). PROPUESTA DE PROTOCOLOS DE SEGURIDAD PARA LA RED INALÁMBRICA LOCAL DE LA UNIVERSIDAD DE CIENFUEGOS. Universidad y Sociedad. 8(4), pp 130-137.
- Google TensorFlow. (2018), TensorFlow For Poets. [En línea]. Disponible en: https://codelabs.developers.google.com/codelabs/tensorflow-for-poets/#3 (Último acceso: 26 August 2020)
- Hirose, M., & Ogawa, K. (2006). Honda humanoid robots development. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 365(1850), pp 11–19. https://doi.org/10.1098/rsta.2006.1917
- OpenCV, s.f. (2018), Docs.opencv.org. [En línea]. Disponible en: https://docs.opencv.org/3.4/d1/d73/tutorial_introduction_to_svm.html
- (Último acceso: 26 August 2020)
- Pralhad Salunkhe, R. & Anil-Patil, A., (2015). Third International Conference on Image Information Processing (ICIIP), 21-24 Dec 2015, Waknaghat: India, Image processing for mango ripening stage detection: RGB and HSV method, IEEE Xplore, 25 Feb 2016. Disponible en: https://doi.org/10.1109/ICIIP.2015.7414796
- Sen Gupta, G., Finnie, M. & Mukhopadhyay, S., (2009). IEEE Instrumentation and Measurement Technology Conference, 5-7 May 2009, Singapore:Singapore, WiFi-based control of a robotic arm with remote vision, IEEE Xplore, 21 Jul 2009. Disponible en: https://doi.org/10.1109/IMTC.2009.5168512
- Shopa, P., Sumitha, N. & Patra, P. S. K., (2014). International Conference on Information Communication and Embedded Systems (ICICES2014), 27-28 Feb 2014, Chennai:India, Traffic Sign Detection and Recognition Using OpenCV, IEEE Xplore, 9 Feb 2015. Disponible en: https://doi.org/10.1109/ICICES.2014.7033810
- Shu, C., Ding, X., & Fang, C. (2011). Histogram of the Oriented Gradient for Face Recognition. Tsinghua Science and Technology 16(2), pp 216-224. https://doi.org/10.1016/S1007-0214(11)70032-3
- Szeliski, R. (2010). Computer Vision: Algorithms and Applications. Springer-Verlag London Limited 2011. Springer, London. Disponible en https://doi.org/10.1007/978-1-84882-935-0
- Xie, L. & Guo, X., (2019). IEEE International Conference on Smart Internet of Things (SmartIoT), 9-11 Aug 2019, Tianjin: China, Object Detection and Analysis of Human Body Postures Based on TensorFlow. Tianjin, China, China, IEEE Xplore, 14 Nov 2019. Disponible en: https://doi.org/10.1109/SmartIoT.2019.00070