Citaciones
Algoritmos para el procesamiento de imágenes implementados en el Robot Humanoide InMoov.
Algorithms for image processing implemented in the InMoov Humanoid Robot.
Abrir | Descargar
Número
Sección
Artículos
Cómo citar
Algoritmos para el procesamiento de imágenes implementados en el Robot Humanoide InMoov. (2021). Revista EIA, 18(36), 36019 pp. 1-16. https://doi.org/10.24050/reia.v18i36.1495
Dimensions




Licencia

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
Declaración del copyright
Los autores ceden en exclusiva a la Universidad EIA, con facultad de cesión a terceros, todos los derechos de explotación que deriven de los trabajos que sean aceptados para su publicación en la Revista EIA, así como en cualquier producto derivados de la misma y, en particular, los de reproducción, distribución, comunicación pública (incluida la puesta a disposición interactiva) y transformación (incluidas la adaptación, la modificación y, en su caso, la traducción), para todas las modalidades de explotación (a título enunciativo y no limitativo: en formato papel, electrónico, on-line, soporte informático o audiovisual, así como en cualquier otro formato, incluso con finalidad promocional o publicitaria y/o para la realización de productos derivados), para un ámbito territorial mundial y para toda la duración legal de los derechos prevista en el vigente texto difundido de la Ley de Propiedad Intelectual. Esta cesión la realizarán los autores sin derecho a ningún tipo de remuneración o indemnización.
La autorización conferida a la Revista EIA estará vigente a partir de la fecha en que se incluye en el volumen y número respectivo en el Sistema Open Journal Systems de la Revista EIA, así como en las diferentes bases e índices de datos en que se encuentra indexada la publicación.
Todos los contenidos de la Revista EIA, están publicados bajo la Licencia Creative Commons Atribución-NoComercial-NoDerivativa 4.0 Internacional
Mostrar biografía de los autores


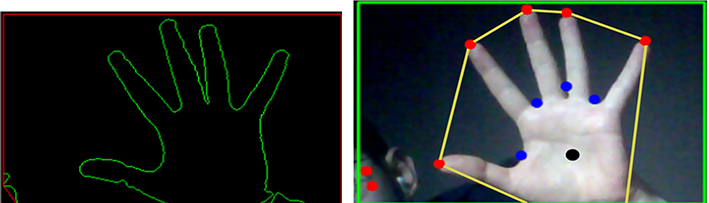
El mundo de la robótica parecía ser un mundo de ciencia ficción hasta hace pocos años, en las últimas décadas los robots se han incorporado en nuestras vidas apoyando en áreas educativas, medicinales, de transporte y recreación entre muchos escenarios más, donde el objetivo es desarrollar robots útiles y seguros. En este artículo se presenta el desarrollo de algoritmos de procesamiento de imágenes implementados en el robot humanoide InMoov, el primer robot 3D open source del mundo y el primero en ser replicado en Colombia para la detección y tracking de movimiento, reconocimiento facial y control de extremidades robóticas mediante mimesis de manos, se implementó un sistema embebido sintetizador de voz, pregunta y respuesta. Estos algoritmos son elaborados e implementados en el InMoov para fortalecer la interacción humano-robot (HRI) y la autonomía del robot, obteniendo una eficiencia promedio de más del 90% de efectividad en ambientes controlados.
Visitas del artículo 628 | Visitas PDF 486
Descargas
Los datos de descarga todavía no están disponibles.
- Bertozzi, M., Broggi, A., Del Rose, M., Felisa, M., Rakotomamonjy, A., & Suard, F., (2007). IEEE Intelligent Transportation Systems Conference, 30 Sept - 3 Oct 2007, Seattle: USA, A Pedestrian Detector Using Histograms of Oriented Gradients and a Support Vector Machine Classifier, IEEE Xplore, 22 Oct 2007. Disponible en: https://doi.org/10.1109/ITSC.2007.4357692
- Buitrago, O., Ramírez, A. & Britto, R. (2015). Nuevo Algoritmo para la Construcción de la Envolvente Convexa en el Plano. Información tecnológica, 26 (4), pp 1-9. https://doi.org/10.4067/S0718-07642015000400017.
- Deepthi, R. S., & Sankaraiah, S., (2011). IEEE Conference on Open Systems (ICOS2011), 25-28 Sept 2011, Langkawi: Malaysia, Implementation of Mobile Platform Using Qt and Open CV For Image Processing Applications, IEEE Xplore, 15 Nov 2011. Disponible en: https://doi.org/10.1109/ICOS.2011.6079235
- Diftler, M., Culbert, C. J., Ambrose, R. O., Plat, R., & Bluethmann, W. J., (2003). IEEE International Conference on Robotics and Automation, 14-19 Sept 2003, Taipei:Taiwan, Evolution of the NASA/DARPA Robonaut control system, IEEE Xplore, 10 Nov 2003. Disponible en: https://doi.org/10.1109/robot.2003.1241975
- Eidenmueller, H. (2017). The Rise of Robots and the Law of Humans. Oxford Legal Studies Research Paper No. 27/2017, pp 2-8. https://doi.org/10.2139/ssrn.2941001
- Gonzalez-Paz, A., Beltran-Casanova, D., & Fuentes-Gari, E. R. (2016). PROPUESTA DE PROTOCOLOS DE SEGURIDAD PARA LA RED INALÁMBRICA LOCAL DE LA UNIVERSIDAD DE CIENFUEGOS. Universidad y Sociedad. 8(4), pp 130-137.
- Google TensorFlow. (2018), TensorFlow For Poets. [En línea]. Disponible en: https://codelabs.developers.google.com/codelabs/tensorflow-for-poets/#3 (Último acceso: 26 August 2020)
- Hirose, M., & Ogawa, K. (2006). Honda humanoid robots development. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 365(1850), pp 11–19. https://doi.org/10.1098/rsta.2006.1917
- OpenCV, s.f. (2018), Docs.opencv.org. [En línea]. Disponible en: https://docs.opencv.org/3.4/d1/d73/tutorial_introduction_to_svm.html
- (Último acceso: 26 August 2020)
- Pralhad Salunkhe, R. & Anil-Patil, A., (2015). Third International Conference on Image Information Processing (ICIIP), 21-24 Dec 2015, Waknaghat: India, Image processing for mango ripening stage detection: RGB and HSV method, IEEE Xplore, 25 Feb 2016. Disponible en: https://doi.org/10.1109/ICIIP.2015.7414796
- Sen Gupta, G., Finnie, M. & Mukhopadhyay, S., (2009). IEEE Instrumentation and Measurement Technology Conference, 5-7 May 2009, Singapore:Singapore, WiFi-based control of a robotic arm with remote vision, IEEE Xplore, 21 Jul 2009. Disponible en: https://doi.org/10.1109/IMTC.2009.5168512
- Shopa, P., Sumitha, N. & Patra, P. S. K., (2014). International Conference on Information Communication and Embedded Systems (ICICES2014), 27-28 Feb 2014, Chennai:India, Traffic Sign Detection and Recognition Using OpenCV, IEEE Xplore, 9 Feb 2015. Disponible en: https://doi.org/10.1109/ICICES.2014.7033810
- Shu, C., Ding, X., & Fang, C. (2011). Histogram of the Oriented Gradient for Face Recognition. Tsinghua Science and Technology 16(2), pp 216-224. https://doi.org/10.1016/S1007-0214(11)70032-3
- Szeliski, R. (2010). Computer Vision: Algorithms and Applications. Springer-Verlag London Limited 2011. Springer, London. Disponible en https://doi.org/10.1007/978-1-84882-935-0
- Xie, L. & Guo, X., (2019). IEEE International Conference on Smart Internet of Things (SmartIoT), 9-11 Aug 2019, Tianjin: China, Object Detection and Analysis of Human Body Postures Based on TensorFlow. Tianjin, China, China, IEEE Xplore, 14 Nov 2019. Disponible en: https://doi.org/10.1109/SmartIoT.2019.00070